В канун католического Рождества 2004: немецкий робот-манипулятор стартует в открытый космос для проведения первого проверочного испытания. Умный космический робот с дистанционным управлением сэкономит затраты и облегчит труд астронавтов.
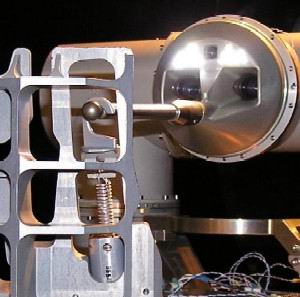
Кёльн / Москва - Для немецкой космической робототехники наступление нового года совпадет с началом важного и долгожданного проверочного испытания: ROKVISS (Robotic Components Verification on ISS - проверка робототехнических компонентов на МКС) - 50-сантиметровый робот-манипулятор с двумя шарнирами, металлическим пальцем и двумя интегрированными камерами стартует в канун рождества с российского космодрома Байконур на беспилотном транспортном корабле «Прогресс М-51» для отправки на Международную космическую станцию (МКС). В конце января робот-манипулятор будет смонтирован на внешней платформе МКС, где он должен будет доказать свою пригодность к работе в условиях открытого космоса: «Мы должны показать, что нашим роботом-манипулятором можно управлять почти без запаздывания, т.е. им можно управлять с Земли в реальном времени, и что он в равной степени обладает высокой автономией», - поясняет профессор Герд Хирцингер из Немецкого центра авиации и космонавтики (DLR) в Оберпффафенхофене близ Мюнхена: «Если нам удастся, то в будущем мы сможем проводить с Земли опасные и трудоемкие работы в космосе и таким образом освободим от этой работы астронавтов. Текущие работы тоже будет лучше проводить с Земли. Кроме того, для беспилотных миссий в глубинах вселенной открываются совершенно новые перспективы благодаря применению умных и исключительно подвижных роботов», - добавляет Хирцингер, в чьем Институте робототехники и механотроники (DLR) был разработан робот-манипулятор.
В начале декабря немецкий робот-манипулятор успешно прошел все заключительные испытания на российском космодроме Байконур. 24 декабря около 03:00 часов (среднеевропейского времени) он вместе с российской ракетой «Союз» должен стартовать на Международную космическую станцию (МКС). На середину января запланирован внешний монтаж немецкого технологического эксперимента на МКС; в марте 2005 г. начинаются эксперименты, которые будут проводиться и оцениваться DLR в Оберпффафенхофене. Проект будет финансировать Немецкий центр авиации и космонавтики (DLR) на средства Федерального Министерства образования и научных исследований (BMBF).
Оборудование и программное обеспечение разрабатывается и создается главным подрядчиком ЕАДС-Спейс Транспортейшн в Бремене и Институтом робототехники и механотроники (DLR) в Оберпффафенхофене, ответственным за робототехнические компоненты и проведение эксперимента, а также научную оценку результатов; фирма «Кайзер-Треде» из Мюнхена занимается разработкой и созданием экспериментальных компьютеров, электроснабжением и технической поддержкой Института DLR. Предприятие Хёрнер&Зульгер поставляет оборудование для камер с электронными приборами. Руководство проектом осуществляет космическое управление DLR. Миссия проводится в соответствии с договоренностью между космическим управлением DLR, российскими партнерами Роскосмос и РКК «Энергия», а также мюнхенским предприятием «Кайзер-Треде» в качестве главного подрядчика на создание коммуникационной структуры S-диапазона.